Watt ise ne Arduino? Da stelle ma uns jans dumm…
So ähnlich könnte sich das in der Feuerzangenbowle anhören. Aber im Ernst, was ist das nun für ein Ding?
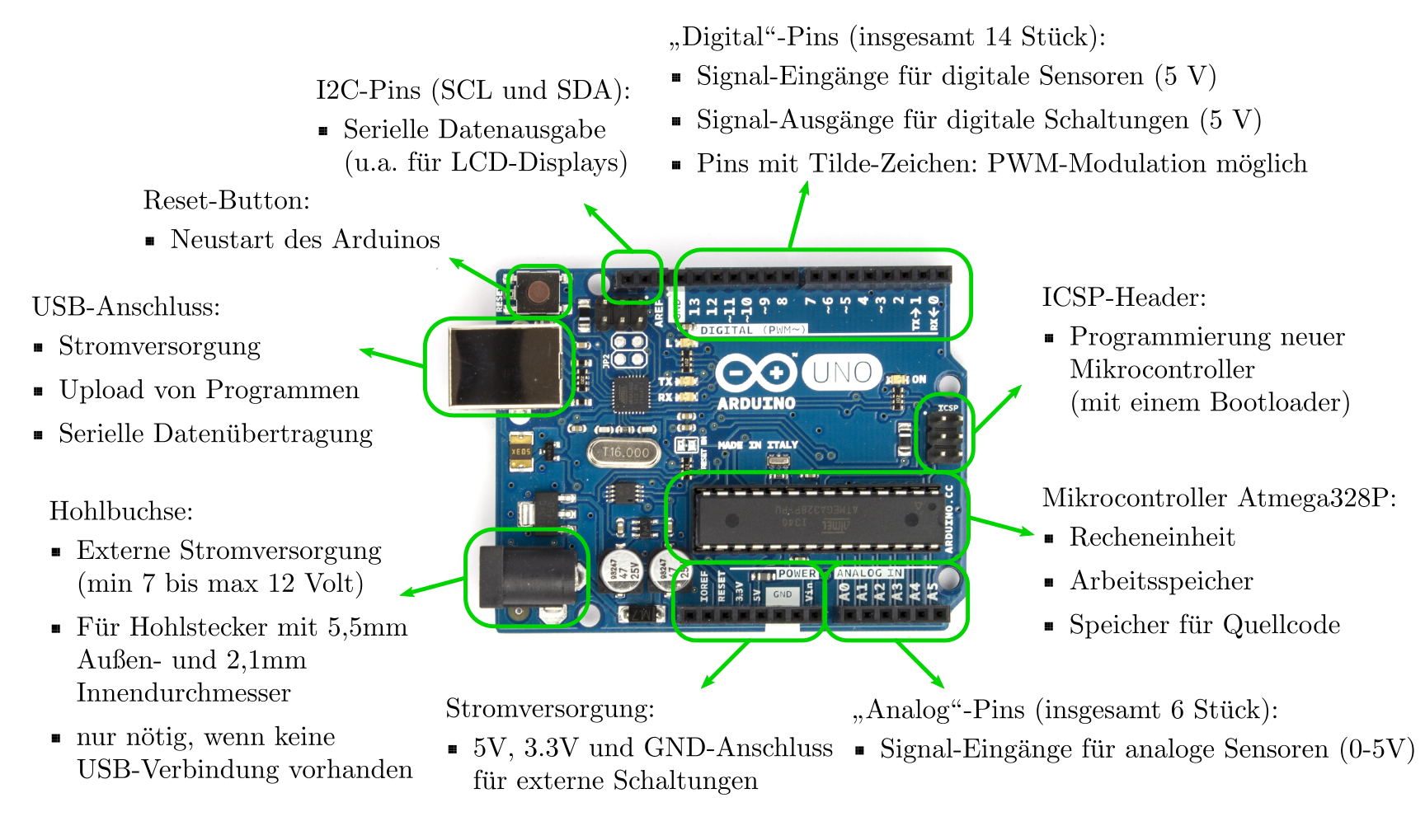
Ein Arduino ist ein kleiner Computer, in der Größe einer halben Tafel Schokolade. Da ist alles drauf, was ein Computer braucht. Ein Rechenwerk, auch Prozessor oder CPU genannt, Arbeitsspeicher, Programmspeicher und eine Vielzahl von Anschlüssen, an denen elektrische Signale ausgegeben oder eingelesen werden können. Ein Arduino ist nicht mit einem PC vergleichbar, der für gewöhnlich einen Bildschirm, eine Tastatur, eine Maus und eine Vielzahl Benutzerprogramme hat. Ein Arduino ist ziemlich nackt und hat eigentlich nur ein einziges Programm, das automatisch startet und in einer unendlichen Schleife läuft. Seine Hauptanwendung ist eben das Messen, Steuern und Regeln.
Die elektrischen Anschlüsse sind das Besondere an dem Arduino. Diese Anschlüsse können z.B. Signale über Sensoren einlesen oder elektrische Signale ausgeben, mit denen man LEDs, Relais oder andere Dinge ein- und ausschalten kann. Mit den mittlerweile reichhaltig erhältlichen Sensoren für den Arduino kann man Spannungen, Ströme, Lichtstärke, Temperatur, Magnetfelder, Abstände, Druck und vieles mehr messen.
Ein Programm im Arduino kann die Eingangssignale auswerten und in Abhängigkeit davon die Ausgangskanäle schalten. Die Eingänge können aber nicht nur Schaltzustände wie AN und AUS erkennen, sondern auch Spannungen messen. Das gleiche gilt auch für die Ausgangsanschlüsse, die zum Teil nicht nur EIN und AUS schalten können, sondern mit einem kleinen Trick auch unterschiedliche Spannungen ausgeben können.
Um mit dem kleinen Arduino-Computer „sprechen“ zu können, d.h., Programme dort einzuspeichern, hat der Arduino einen USB-Anschluss, über den die Platine auch mit Spannung versorgt wird. Soll die Arduino-Platine für sich alleine arbeiten, gibt es noch die Möglichkeit an einem speziellen Stecker eine Versorgungsgleichspannung von 7-12 V einzuspeisen. Der Arduino macht daraus für sich die Betriebsspannung.
Um den Arduino programmieren zu können braucht man für seinen PC eine so genannte Enwicklungsoberfläche. Die Oberfläche sieht in etwa wie ein Textverarbeitungsprogramm aus (z.B. Word). In diesem Textverarbeitungsprogramm schreibt man die Programmbefehle.

Die Programme werden in einer Hochsprache geschrieben, das heißt, dass die Befehle für uns verständliche Wörter verwenden (sofern man ansatzweise etwas Englisch kann). Die Befehle müssen in einer bestimmten Form und Reihenfolge geschrieben werden, man nennt das auch Syntax. Man kann sich das wie einen normalen Satz vorstellen.
Nimmt man den Satz „Gehe zu dem Haus am Ende der Straße und wirf einen Brief in den Briefkasten.“ Den Satz versteht jeder und jeder weiß was er dann tun soll. Wenn ich dieselben Wörter in einer falschen Reihenfolge schreibe, z.B.:
„Gehe zu Briefkasten einen Brief Haus Ende Straße der und wirf dem am in den“, weiß keiner mehr so richtig was gemeint ist. Ein Computer hat leider nicht die Intelligenz und die Erfahrung, um aus den Wörtern den Sinn zu erkennen und richtig zu handeln, darum muß jede Anweisung bis auf das letzte Leerzeichen, Klammern und Wort, 100% richtig geschrieben sein. Wenn nicht, dann gibt’s solange Mecker bis es stimmt.
Als nächstes kommt das Programmieren, aber alles schön einfach.
Natürlich kann es in diesem Thema vorkommen, dass ich gewisse Sachen unterschlage, nicht 100% nach Lehrbuch schreibe und bewusst etwas ungenau bleibe, das kommt alles später") wenn der totale Rookie anfängt zu verstehen.
wenn der totale Rookie anfängt zu verstehen.
So ähnlich könnte sich das in der Feuerzangenbowle anhören. Aber im Ernst, was ist das nun für ein Ding?
Ein Arduino ist ein kleiner Computer, in der Größe einer halben Tafel Schokolade. Da ist alles drauf, was ein Computer braucht. Ein Rechenwerk, auch Prozessor oder CPU genannt, Arbeitsspeicher, Programmspeicher und eine Vielzahl von Anschlüssen, an denen elektrische Signale ausgegeben oder eingelesen werden können. Ein Arduino ist nicht mit einem PC vergleichbar, der für gewöhnlich einen Bildschirm, eine Tastatur, eine Maus und eine Vielzahl Benutzerprogramme hat. Ein Arduino ist ziemlich nackt und hat eigentlich nur ein einziges Programm, das automatisch startet und in einer unendlichen Schleife läuft. Seine Hauptanwendung ist eben das Messen, Steuern und Regeln.
Die elektrischen Anschlüsse sind das Besondere an dem Arduino. Diese Anschlüsse können z.B. Signale über Sensoren einlesen oder elektrische Signale ausgeben, mit denen man LEDs, Relais oder andere Dinge ein- und ausschalten kann. Mit den mittlerweile reichhaltig erhältlichen Sensoren für den Arduino kann man Spannungen, Ströme, Lichtstärke, Temperatur, Magnetfelder, Abstände, Druck und vieles mehr messen.
Ein Programm im Arduino kann die Eingangssignale auswerten und in Abhängigkeit davon die Ausgangskanäle schalten. Die Eingänge können aber nicht nur Schaltzustände wie AN und AUS erkennen, sondern auch Spannungen messen. Das gleiche gilt auch für die Ausgangsanschlüsse, die zum Teil nicht nur EIN und AUS schalten können, sondern mit einem kleinen Trick auch unterschiedliche Spannungen ausgeben können.
Um mit dem kleinen Arduino-Computer „sprechen“ zu können, d.h., Programme dort einzuspeichern, hat der Arduino einen USB-Anschluss, über den die Platine auch mit Spannung versorgt wird. Soll die Arduino-Platine für sich alleine arbeiten, gibt es noch die Möglichkeit an einem speziellen Stecker eine Versorgungsgleichspannung von 7-12 V einzuspeisen. Der Arduino macht daraus für sich die Betriebsspannung.
Um den Arduino programmieren zu können braucht man für seinen PC eine so genannte Enwicklungsoberfläche. Die Oberfläche sieht in etwa wie ein Textverarbeitungsprogramm aus (z.B. Word). In diesem Textverarbeitungsprogramm schreibt man die Programmbefehle.
Die Programme werden in einer Hochsprache geschrieben, das heißt, dass die Befehle für uns verständliche Wörter verwenden (sofern man ansatzweise etwas Englisch kann). Die Befehle müssen in einer bestimmten Form und Reihenfolge geschrieben werden, man nennt das auch Syntax. Man kann sich das wie einen normalen Satz vorstellen.
Nimmt man den Satz „Gehe zu dem Haus am Ende der Straße und wirf einen Brief in den Briefkasten.“ Den Satz versteht jeder und jeder weiß was er dann tun soll. Wenn ich dieselben Wörter in einer falschen Reihenfolge schreibe, z.B.:
„Gehe zu Briefkasten einen Brief Haus Ende Straße der und wirf dem am in den“, weiß keiner mehr so richtig was gemeint ist. Ein Computer hat leider nicht die Intelligenz und die Erfahrung, um aus den Wörtern den Sinn zu erkennen und richtig zu handeln, darum muß jede Anweisung bis auf das letzte Leerzeichen, Klammern und Wort, 100% richtig geschrieben sein. Wenn nicht, dann gibt’s solange Mecker bis es stimmt.
Als nächstes kommt das Programmieren, aber alles schön einfach.
Natürlich kann es in diesem Thema vorkommen, dass ich gewisse Sachen unterschlage, nicht 100% nach Lehrbuch schreibe und bewusst etwas ungenau bleibe, das kommt alles später
wenn der totale Rookie anfängt zu verstehen.
Zuletzt bearbeitet:
