Vorwort / Einführender Text
Das NRF24L01 ist ein 2,4 Ghz Sende- und Empfangsmodul, um mit Arduino & Co und Raspberrys usw. Daten drahtlos miteinander austauschen zu können. Es gibt noch 433 Mhz Module zum Datenaustausch, die haben leider den Nachteil, dass man zum Senden und Empfangen jeweils ein eigenes Modul benötigt, d.h. für eine bidirektionale Kommunikation muß man zwei Module an einen Arduino anschließen.
Beim NRF24 benötigt man zu dem Zweck nur ein einziges Modul pro Arduino, weil der NRF24 sowohl senden, als auch empfangen kann. Es gibt arduinoähnliche Controllerboards, die bereits ein 2,4 GHz Kommunikationsmodul besitzen (ESP8266), allerdings brauchen diese Module stets ein funktionierendes WLAN mit Adressen, Zugängen, Passwörtern usw.. Das NRF24 ist da etwas einfacher gestrickt. Da müssen die beteiligten Kommunikationspartner nur eine gemeinsame Adresse haben, ohne jegliches WLAN. Man kann damit recht komplizierte Netzwerke errichten, bei denen Datenpakete über selbst erstelle Knotenpunkte durchgereicht werden können (z.B. zur Reichweitenvergrößerung), aber man muß es nicht und kann alles sehr einfach und übersichtlich halten.
Bei meinen Aktivitäten bin ich darüber gestolpert, dass es offensichtlich zwei unterschiedliche Modultypen des NRF24L01 gibt, einmal den "einfachen" NRF24L01 und den NRF24L01+. Der mit dem Plus kann als Sender mit seinem Gegenpart automatisch feststellen, ob ein Datentelegramm vollständig und richtig beim Empfänger angekommen ist. Sollte das nicht der Fall sein, wird das Datentelegramm erneut gesendet, ohne dass man selbst irgendeine zusätzliche Zeile Code in sein Programm einbauen muß. Die normalen Module und die Plus Module unterscheiden sich optisch nicht, man muß nur bei der Bestellung darauf achten, dass man auch die + Version bekommt/bestellt.
Wenn Ihr Fragen oder Probleme habt, dann seht zuerst im Thema NRF24l01 2,4GHz Sende und Empfangsmodul - FAQ - Problembehandlungen nach und postet ggf. dort eure Fragen.
Bitte keine Anfragen per PN! Postst euer Problem im offenen Forum, weil die Beantwortung viel Zeit in Anspruch nimmt, und so auch andere Fragesuchenden davon profitieren können. Wer weiß, vielleicht wurde Dein Problem auch schon mal nur per PN bearbeitet und beantwortet.

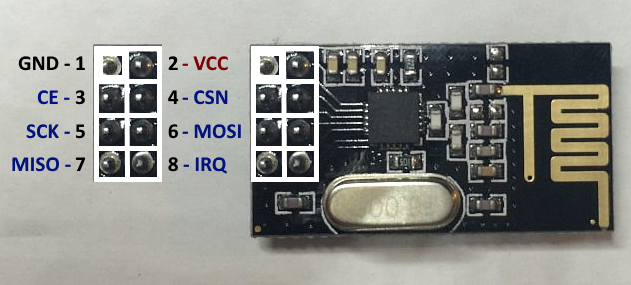
Das Foto zeigt die Plus Version

Das NRF24L01 ist ein 2,4 Ghz Sende- und Empfangsmodul, um mit Arduino & Co und Raspberrys usw. Daten drahtlos miteinander austauschen zu können. Es gibt noch 433 Mhz Module zum Datenaustausch, die haben leider den Nachteil, dass man zum Senden und Empfangen jeweils ein eigenes Modul benötigt, d.h. für eine bidirektionale Kommunikation muß man zwei Module an einen Arduino anschließen.
Beim NRF24 benötigt man zu dem Zweck nur ein einziges Modul pro Arduino, weil der NRF24 sowohl senden, als auch empfangen kann. Es gibt arduinoähnliche Controllerboards, die bereits ein 2,4 GHz Kommunikationsmodul besitzen (ESP8266), allerdings brauchen diese Module stets ein funktionierendes WLAN mit Adressen, Zugängen, Passwörtern usw.. Das NRF24 ist da etwas einfacher gestrickt. Da müssen die beteiligten Kommunikationspartner nur eine gemeinsame Adresse haben, ohne jegliches WLAN. Man kann damit recht komplizierte Netzwerke errichten, bei denen Datenpakete über selbst erstelle Knotenpunkte durchgereicht werden können (z.B. zur Reichweitenvergrößerung), aber man muß es nicht und kann alles sehr einfach und übersichtlich halten.
Bei meinen Aktivitäten bin ich darüber gestolpert, dass es offensichtlich zwei unterschiedliche Modultypen des NRF24L01 gibt, einmal den "einfachen" NRF24L01 und den NRF24L01+. Der mit dem Plus kann als Sender mit seinem Gegenpart automatisch feststellen, ob ein Datentelegramm vollständig und richtig beim Empfänger angekommen ist. Sollte das nicht der Fall sein, wird das Datentelegramm erneut gesendet, ohne dass man selbst irgendeine zusätzliche Zeile Code in sein Programm einbauen muß. Die normalen Module und die Plus Module unterscheiden sich optisch nicht, man muß nur bei der Bestellung darauf achten, dass man auch die + Version bekommt/bestellt.
Wenn Ihr Fragen oder Probleme habt, dann seht zuerst im Thema NRF24l01 2,4GHz Sende und Empfangsmodul - FAQ - Problembehandlungen nach und postet ggf. dort eure Fragen.
Bitte keine Anfragen per PN! Postst euer Problem im offenen Forum, weil die Beantwortung viel Zeit in Anspruch nimmt, und so auch andere Fragesuchenden davon profitieren können. Wer weiß, vielleicht wurde Dein Problem auch schon mal nur per PN bearbeitet und beantwortet.
Das Foto zeigt die Plus Version
Zuletzt bearbeitet:
 . Natürlich wird auch Masse benötigt.
. Natürlich wird auch Masse benötigt.