Modellbau Servos
Was auch immer wieder gefragt wird:
Unterschied zwischen Digital- und Analogservos.
Der tatsächliche Unterschied besteht darin, dass die digitalen Servos schneller und genauer sind und ihre Position besser halten können.
Sie sind in der Bauform leichter, kleiner, robuster, schneller, genauer.
Analoge Servos geben ihrem Motor alle 20ms ein Signal. Wirkt eine Kraft auf die Servos, braucht die Steuerelektronik bis zu 20ms, um dem Motor einen neuen Spannungsimpuls zu senden.
Die verschiedenen Servos.
Standard Servos (Typ 1):
Preiseinstiegsklasse erhalten Sie hochwertige Servotechnik zu sehr günstigen Preisen.
Kugel gelagerte Standard Servos (Typ 2):
Kugelgelagerte Servos garantieren Ihnen selbst bei geringsten Steuerbewegungen eine hohe Stellgenauigkeit und maximale Kraftübertragung.
Kugel gelagerte Standard Servos mit Metallgetriebe (Typ 3):
Durch die Verwendung von Metallgetrieben sind diese extrem robusten Servos im harten RC-Einsatz für maximale Kraftübertragung bei hoher mechanischer Belastung ausgelegt.
Spezial Servos (Typ 4):
Ob Sie das Großsegel an Ihrem Modellboot oder das Einziehfahrwerk an Ihrem Kunstflugmodell bewegen möchten. Besondere Aufgaben erfordern spezielle Servos.
Jumbo Servos (Typ 5):
Dank der enormen Kraftentfaltung sind diese Servos ideal für viele Anwendungen im Großmodellbau geeignet.
Super Micro Servos (Typ 6):
Erschließen Sie sich neue Dimensionen im Kleinstmodellbau. Die rekordverdächtig kleinen Abmessungen dieser neuen Super Micro Servos bieten Ihnen bis dato ungeahnte Möglichkeiten.
Micro Servos (Typ 7):
Wenn Sie für Ihr RC Modell einen kraftvollen Servo benötigen, obwohl nur wenig Platz für den Einbau zur Verfügung steht, sind diese Rudermaschinen die ideale Lösung.
Mini Servos (Typ 8):
Groß in der Leistung und klein in den Abmessungen. Dank dieser Leistungsmerkmale eignen sich diese Servos für die unterschiedlichsten Aufgaben im Modellbaubereich.
Digital Servos (Typ 9):
Extreme Stellgenauigkeit, eine exakte Neutralstellung, ein höheres Drehmoment und eine gigantische Haltekraft zeichnen diese programmierbaren Digital-Servos aus. Ein 6-fach Potentiometer gewährleistet dabei maximale Kontaktsicherheit.
Bei den neuen Digital Servos sendet die Steuerelektronik alle 400us einen Impuls an den Motor.
Der Unterschied zwischen Digital und Analog Servos liegt in der Erfassung der Stellposition.
Bei einem Analog-Servo geschieht das über ein so genanntes Potentiometer (kurz Poti). Das ist ein regelbarer Spannungsteiler oder auch ein einstellbarer Widerstand. So ein Poti kann aber nur in gewissen Toleranzen arbeiten, weil es eben ein analoges Bauteil ist.
Analoge Servos brummen.
Der Nachteil besteht darin, vor allem bei besonders schnellen und/oder starken Servos die viel Strom benötigen, in dem hohen Verschleiß bzw. der hohen Abnutzung eben dieses Potis. Ein digitales Servo hat diese Problem nicht! Die Stellung wird zwar noch analog erfasst aber digital weiter verarbeitet.
Diese Umwandlung findet im DA-Wandler (Digital-Analog-Wandler) statt. Die Verarbeitung erfolgt digital über Mikroprozessoren. Dadurch ist eine weitaus höhere Stellgenauigkeit möglich. ABER ICs und andere elektronische Bauteile haben eine Arbeitsspannung von ~5 Volt. Daher kann man Digitalservos bei einer zu hohen Spannung ganz einfach "killen". Wie z.B. bei einem 5zelligen Akkupack, oder einer BEC-Spannung von <5,5V. Dennoch überwiegen die Vorteile der Digitalservos auch wenn Analogservos etwas "Spannungsfester" sind. Aber auch die vertragen gewiss keine Überspannung.
Stellt sich am Schluss noch die Frage, kann man die analogen Servos mit den handelsüblichen Fernsteuerungen ansprechen? Grundsätzlich JA.
Empfänger haben eine gewisse "Stromgrenze", mit der sie die Servos versorgen können.
Ich würd aufpassen, ein sehr alter Empfänger könnte von einem sehr starken Digiservo überlastet werden!
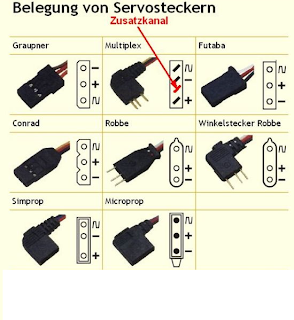
Handelsübliche Servomotoren besitzen 3 Anschlüsse:
GND
PWM bzw. Signal
+5V
Wobei sich die Steckerbelegung von Hersteller zu Hersteller unterscheidet, siehe Bilder.
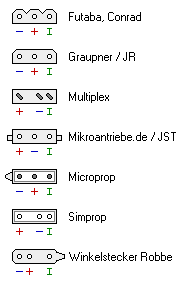
Servostecker mit den Farben der Anschlußkabel. Bein Kabelfarben gibt es u.U. Überraschungen, weil üblicherweise die Farben für + Plus rot sind und für Masse - schwarz.
Bei Simprop z.B. wird das schwarze Kabel unüblichwerweise für das Steuersignal verwendet und Masse - ist dort blau.
Die Signalkabel haben ebenso mehrere Farben, die verwendet werden. Meist sind diese gelb, orange und weiß.
Es kann in seltenen Fällen vorkommen, dass die Signalkabel auch violett sind.

Quelle Modellfliegerclub-Ostrachtal
So funktioniert ein Servo:
Was auch immer wieder gefragt wird:
Unterschied zwischen Digital- und Analogservos.
Der tatsächliche Unterschied besteht darin, dass die digitalen Servos schneller und genauer sind und ihre Position besser halten können.
Sie sind in der Bauform leichter, kleiner, robuster, schneller, genauer.
Analoge Servos geben ihrem Motor alle 20ms ein Signal. Wirkt eine Kraft auf die Servos, braucht die Steuerelektronik bis zu 20ms, um dem Motor einen neuen Spannungsimpuls zu senden.
Die verschiedenen Servos.
Standard Servos (Typ 1):
Preiseinstiegsklasse erhalten Sie hochwertige Servotechnik zu sehr günstigen Preisen.
Kugel gelagerte Standard Servos (Typ 2):
Kugelgelagerte Servos garantieren Ihnen selbst bei geringsten Steuerbewegungen eine hohe Stellgenauigkeit und maximale Kraftübertragung.
Kugel gelagerte Standard Servos mit Metallgetriebe (Typ 3):
Durch die Verwendung von Metallgetrieben sind diese extrem robusten Servos im harten RC-Einsatz für maximale Kraftübertragung bei hoher mechanischer Belastung ausgelegt.
Spezial Servos (Typ 4):
Ob Sie das Großsegel an Ihrem Modellboot oder das Einziehfahrwerk an Ihrem Kunstflugmodell bewegen möchten. Besondere Aufgaben erfordern spezielle Servos.
Jumbo Servos (Typ 5):
Dank der enormen Kraftentfaltung sind diese Servos ideal für viele Anwendungen im Großmodellbau geeignet.
Super Micro Servos (Typ 6):
Erschließen Sie sich neue Dimensionen im Kleinstmodellbau. Die rekordverdächtig kleinen Abmessungen dieser neuen Super Micro Servos bieten Ihnen bis dato ungeahnte Möglichkeiten.
Micro Servos (Typ 7):
Wenn Sie für Ihr RC Modell einen kraftvollen Servo benötigen, obwohl nur wenig Platz für den Einbau zur Verfügung steht, sind diese Rudermaschinen die ideale Lösung.
Mini Servos (Typ 8):
Groß in der Leistung und klein in den Abmessungen. Dank dieser Leistungsmerkmale eignen sich diese Servos für die unterschiedlichsten Aufgaben im Modellbaubereich.
Digital Servos (Typ 9):
Extreme Stellgenauigkeit, eine exakte Neutralstellung, ein höheres Drehmoment und eine gigantische Haltekraft zeichnen diese programmierbaren Digital-Servos aus. Ein 6-fach Potentiometer gewährleistet dabei maximale Kontaktsicherheit.
Bei den neuen Digital Servos sendet die Steuerelektronik alle 400us einen Impuls an den Motor.
Der Unterschied zwischen Digital und Analog Servos liegt in der Erfassung der Stellposition.
Bei einem Analog-Servo geschieht das über ein so genanntes Potentiometer (kurz Poti). Das ist ein regelbarer Spannungsteiler oder auch ein einstellbarer Widerstand. So ein Poti kann aber nur in gewissen Toleranzen arbeiten, weil es eben ein analoges Bauteil ist.
Analoge Servos brummen.
Der Nachteil besteht darin, vor allem bei besonders schnellen und/oder starken Servos die viel Strom benötigen, in dem hohen Verschleiß bzw. der hohen Abnutzung eben dieses Potis. Ein digitales Servo hat diese Problem nicht! Die Stellung wird zwar noch analog erfasst aber digital weiter verarbeitet.
Diese Umwandlung findet im DA-Wandler (Digital-Analog-Wandler) statt. Die Verarbeitung erfolgt digital über Mikroprozessoren. Dadurch ist eine weitaus höhere Stellgenauigkeit möglich. ABER ICs und andere elektronische Bauteile haben eine Arbeitsspannung von ~5 Volt. Daher kann man Digitalservos bei einer zu hohen Spannung ganz einfach "killen". Wie z.B. bei einem 5zelligen Akkupack, oder einer BEC-Spannung von <5,5V. Dennoch überwiegen die Vorteile der Digitalservos auch wenn Analogservos etwas "Spannungsfester" sind. Aber auch die vertragen gewiss keine Überspannung.
Stellt sich am Schluss noch die Frage, kann man die analogen Servos mit den handelsüblichen Fernsteuerungen ansprechen? Grundsätzlich JA.
Empfänger haben eine gewisse "Stromgrenze", mit der sie die Servos versorgen können.
Ich würd aufpassen, ein sehr alter Empfänger könnte von einem sehr starken Digiservo überlastet werden!
Handelsübliche Servomotoren besitzen 3 Anschlüsse:
GND
PWM bzw. Signal
+5V
Wobei sich die Steckerbelegung von Hersteller zu Hersteller unterscheidet, siehe Bilder.
Servostecker mit den Farben der Anschlußkabel. Bein Kabelfarben gibt es u.U. Überraschungen, weil üblicherweise die Farben für + Plus rot sind und für Masse - schwarz.
Bei Simprop z.B. wird das schwarze Kabel unüblichwerweise für das Steuersignal verwendet und Masse - ist dort blau.
Die Signalkabel haben ebenso mehrere Farben, die verwendet werden. Meist sind diese gelb, orange und weiß.
Es kann in seltenen Fällen vorkommen, dass die Signalkabel auch violett sind.

Quelle Modellfliegerclub-Ostrachtal
So funktioniert ein Servo:
Zuletzt bearbeitet: