Für Lichtsteuerungen mit Arduinos gibt es inzwischen viele Themen und Projekte. Entweder wird ein fertiges Projekt vorgestellt (was toll für die ist, die einfach nur nachbauen möchten), oder es gibt Themen mit endlosen Supportbemühungen. Ich werde mich jetzt mal von allem, was schon komplett fertig ist, lösen und quasi von vorne anfangen. Ich werde sicher verschiedene Teillösungen ausprobieren und zum Teil auch eigene Wege gehen. Im Vordergrund steht das Ausprobieren, an dessem Ende natürlich (m)eine fertige Schaltung und (m)ein fertiges Programm stehen soll. Irgendwie wird mein fertiges "Produkt" auch wieder eine neue Zusammenstellung von unzähligen Teilbemühungen von anderen fleißigen Makern sein. Die Essenz ist aber, dass ich nicht nur einfach Bausteinchen zusammensetzen will, sondern möglichst die Teillösungen verstehen und erklären können.
Die Basis, wie könnte es anders sein, wird die Vorlage von Rockracer sein, die ich schon sofort dadurch verändere, dass ich nicht für eine Schaltfunktion zwei digitale Ausgänge verwende, damit der Strom auch ausreicht. Das hat einige angenehme Nebeneffekte. 1. Es stehen mehr freie, unabhängige Schaltkanäle zur Verfügung und dadurch, dass jeweils nur ein Pin gesetzt werden mus, spart man hier und da ein paar Prozessortakte, die man vieleicht besser zur Abfrage der RC-Steuerkanäle benötigt.
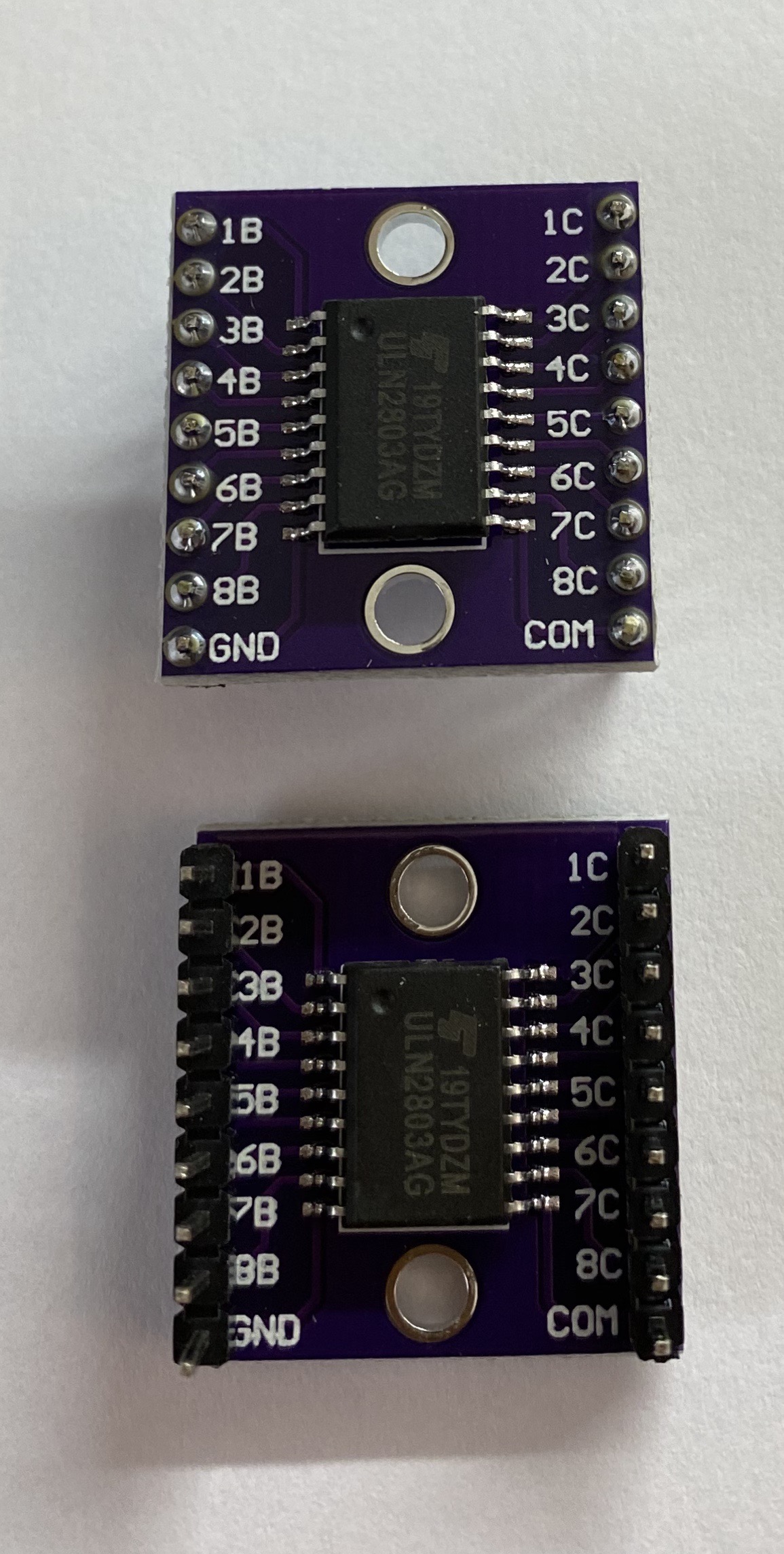
Dafür sind natürlich zusätzliche Transistoren o.ä. nötig, damit der benötigte Strom auch geschaltet werden kann. Dafür war ich shoppen und werde im weiteren Verlauf des Themas folgende Platinen mit einem ULN2803 einsetzen.
Ich beginne mit der Belegung der Digitalkanäle des Nanos.
Als Eingänge für die Abfrage der RC-Kanäle
Theoretisch könnte man auch eine kleine Hardware zwischen den nano und den Blinkern setzen, sodass der Nano nur ein High oder ein Low-Signal ausgeben braucht. Aber das nur so als Gedanke.
Edit: Das wäre z.B. eine Lösung, um das Blinken selbst (also das Ein und Ausschalten) auszulagern, sodass der Arduino sich nicht darum kümmern muß.
Blink LED als Taktgeber für Blinker
Die Testschaltung ist also noch sehr übersichtlich, der Nano, 5 Widerstände, 5 LEDs und ein paar Strippen.
Der Empfänger fehlt, kommt aber als nächstes dran.

Die Basis, wie könnte es anders sein, wird die Vorlage von Rockracer sein, die ich schon sofort dadurch verändere, dass ich nicht für eine Schaltfunktion zwei digitale Ausgänge verwende, damit der Strom auch ausreicht. Das hat einige angenehme Nebeneffekte. 1. Es stehen mehr freie, unabhängige Schaltkanäle zur Verfügung und dadurch, dass jeweils nur ein Pin gesetzt werden mus, spart man hier und da ein paar Prozessortakte, die man vieleicht besser zur Abfrage der RC-Steuerkanäle benötigt.
Dafür sind natürlich zusätzliche Transistoren o.ä. nötig, damit der benötigte Strom auch geschaltet werden kann. Dafür war ich shoppen und werde im weiteren Verlauf des Themas folgende Platinen mit einem ULN2803 einsetzen.
Ich beginne mit der Belegung der Digitalkanäle des Nanos.
- Blinker Links - Pin 4
- Blinker Rechts - Pin 5
- Rücklicht - Pin 6
- Hauptscheinwerfer - Pin 7
- Rückfahrscheinwerfer - Pin 8
Als Eingänge für die Abfrage der RC-Kanäle
- Gaskanal - Pin 2
- Servokanal Lenkung - Pin 3
Theoretisch könnte man auch eine kleine Hardware zwischen den nano und den Blinkern setzen, sodass der Nano nur ein High oder ein Low-Signal ausgeben braucht. Aber das nur so als Gedanke.
Edit: Das wäre z.B. eine Lösung, um das Blinken selbst (also das Ein und Ausschalten) auszulagern, sodass der Arduino sich nicht darum kümmern muß.
Blink LED als Taktgeber für Blinker
Die Testschaltung ist also noch sehr übersichtlich, der Nano, 5 Widerstände, 5 LEDs und ein paar Strippen.
Der Empfänger fehlt, kommt aber als nächstes dran.
Zuletzt bearbeitet:



